After successfully assembling three robust databases within the PLEIADES platform, the focus shifted to practical testing using tools from project partners. The Base Chaude Opérationnelle de Tricastin (BCOT) served as a pivotal case study, offering valuable insights into the platform’s effectiveness in real-world scenarios.
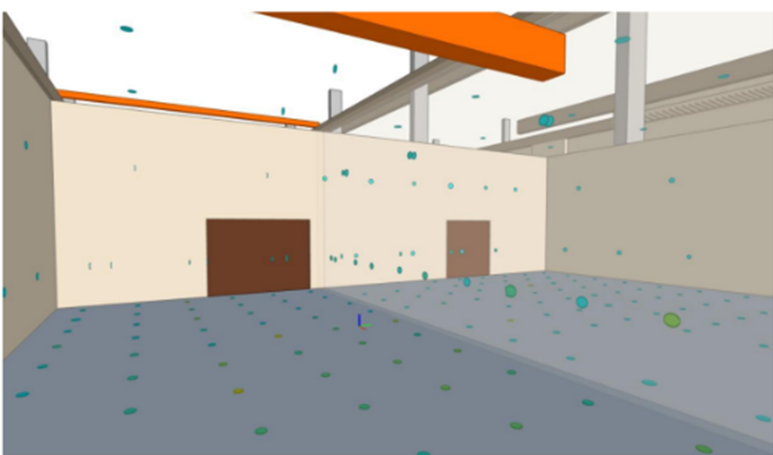
The case study delves into the simulated civil engineering remediation of two rooms within the BCOT nuclear facility. The simulation encompassed a series of operations, including airlock installation, walls remediation, scaffold setup, ceiling remediation, scaffold dismantling, floor remediation, airlock dismantling, and concluding with the end-of-job radiological control of the room. To comprehensively evaluate the effectiveness of these simulations, a meticulous comparison was conducted between two distinct scenarios: a 100% contact scenario and a remote scenario involving the utilization of a robot.
Several specialized tools were employed to gather and analyze data pertinent to the BCOT use case:
- DEMplus® for nuclear: This tool conducted scenario simulations and compared results in terms of cost, duration, total waste, collective dose, and atmospheric contamination. The overarching analysis included a comparison between manual and automated scenarios.
- AquilaCosting : AquilaCosting played a pivotal role in providing a second estimate of the costs associated with the remediation activities for two rooms of the BCOT facility. This encompassed labor costs, investments, expenses, and contingency, utilizing data extracted from the BCOT 3D model stored in the PLEIADES database.
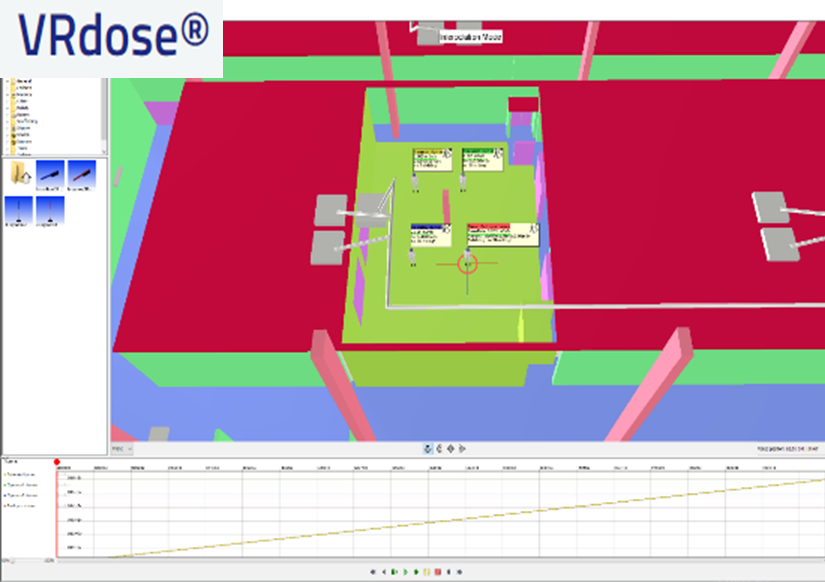
- VRdose: VRdose provided insights into radiation exposure during the simulation.The initial scenario was crafted in HVRC VRdose, focusing on specific tasks performed by the associated work team. The outcomes included the dose uptake per worker in the team for the assigned tasks.
- iDROP: iDROP facilitated the testing of robot accessibility within a designated zone. This involved the introduction of the robot’s 3D model for BCOT and an interactive simulation, allowing manual control of the robot in an immersive environment.

Follow the project’s LinkedIn page and subscribe to our newsletter to keep up-to-date with the project’s progress!